ΣΥΝΟΔΙΑ
Συντονισμός Κίνησης Πολλαπλών Αυτόνομων Ρομποτικών Οχημάτων σε Περιβάλλον με Εμπόδια
Περιγραφή
Η χρήση πολλαπλών αυτόνομων ρομπότ έχει καθιερωθεί τα τελευταία χρόνια ως ένας αποτελεσματικός τρόπος για την αντιμετώπιση μιας ευρείας γκάμας προβλημάτων, όπως η εξερεύνηση άγνωστων χώρων, η επιτήρηση χώρων για λόγους ασφάλειας, ο χειρισμός αντικειμένων, η συναρμολόγηση πολύπλοκων κατασκευών, κλπ. οδηγώντας σε αύξηση της ευελιξίας και της ευρωστίας καθώς και σε μείωση κόστους, συγκριτικά με τη χρήση ενός και μόνου ρομπότ.
Εν γένει, ο έλεγχος της ομάδας των συνεργαζόμενων ρομπότ μπορεί να είναι είτε συγκεντρωτικός (centralized), είτε αποκεντρωμένος (decentralized). Παρόλο που η σχεδίαση συγκεντρωτικών σχημάτων ελέγχου είναι απλή, διότι υπάρχει ένας μοναδικός στόχος, και μπορεί έτσι να οδηγήσει σε συνολικά βέλτιστες λύσεις, απαιτεί ωστόσο τη συλλογήδεδομένων από όλα τα μέλη της ομάδας και την επεξεργασία τους σε μια κεντρική μονάδα ελέγχου. Το γεγονός αυτό την καθιστά μη αποδοτική, ιδιαίτερα όταν το πλήθος των ρομπότ που συμμετέχουν στην ομάδα αυξάνεται σημαντικά. Επιπλέον, υπάρχουν δύο τύποι επικοινωνίας μεταξύ ρομπότ, πιο συγκεκριμένα η άμεση και η έμμεση επικοινωνία. Ο πρώτος τύπος είναι σχεδιασμένος αποκλειστικά για τη μεταφορά δεδομένων απευθείας σε άλλαρομπότ, μέσω εγκατεστημένου δικτύου επικοινωνίας ενώ η έμμεση επικοινωνία προκύπτει από την αλληλεπίδραση των ρομπότ, είτε με φυσική επαφή είτε ανέπαφα.
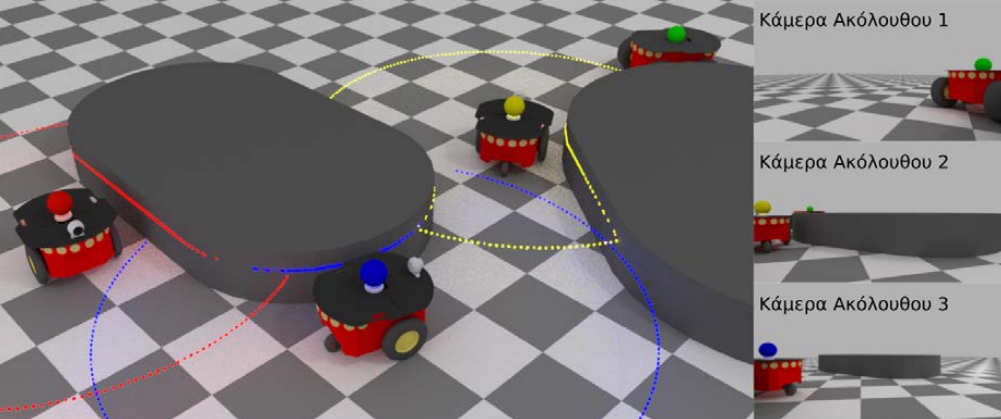
Στόχος του συγκεκριμένου ερευνητικού έργου είναι ο σχεδιασμός ενός αποκεντρωμένου σύστηματος ελέγχου για τον συντονισμό της κίνησης πολλαπλών αυτόνομων ρομποτικών οχημάτων σε περιβάλλον με εμπόδια. Το σχήμα ελέγχου θα ακολουθεί την αρχιτεκτονική οδηγού-ακόλουθου και θα βασίζεται αποκλειστικά στον έμμεσο τύπο επικοινωνίας, που θα επιτυγχάνεται με οπτική παρατήρηση των γειτονικών ρομπότ, χρησιμοποιώντας κάμερα κατάλληλα τοποθετημένη σε κάθε ρομπότ. Επιπλέον, η ανίχνευση των εμποδίων για την αποφυγή συγκρούσεων (collision avoidance) θα επιτυγχάνεται με αισθητήρες εγγύτητας (range finders). Ωστόσο, η χρήση κάμερας για τον εντοπισμό των γειτονικών ρομπότ εισάγει λειτουργικούς περιορισμούς στο σύστημα, που προκύπτουν από το στενό εύρος θέασης (narrow field of view) του αισθητήρα της κάμερας (<180ο), καθώς και το γεγονός ότι εμπόδια στο χώρου εργασίας μπορεί να παρεμβληθούν μεταξύ των συνεργαζόμενων ρομπότ και να μην επιτρέπουν έτσι την οπτική επαφή (visual obstruction). Για την αντιμετώπιση των προαναφερθέντων λειτουργικών περιορισμών θα υιοθετηθεί η τεχνική ελέγχου προδιαγεγραμμένης επίδοσης (prescribed performance control), η οποία θα εξασφαλίζει την απρόσκοπτη λειτουργία του πολύ-ρομποτικού συστήματος, χωρίς διακοπές στην οπτική διασυνδεσιμότητα (visual connectivity), με ταυτόχρονη αποφυγή των εμποδίων, ικανοποιώντας κατάλληλα επιλεγμένα κριτήρια απόκρισης τόσο στη μεταβατική όσο και στη μόνιμη κατάσταση.
Ερευνητικά Ερωτήματα & Υποθέσεις Εργασίας
Πιο συγκεκριμένα, το προς μελέτη πρόβλημα είναι ο συντονισμός κίνησης ενός πολυρομποτικού συστήματος σε σχηματισμό αλυσίδας, μέσα σε περιβάλλον με σταθερά κυρτά εμπόδια. Το ρομπότ-οδηγός που κατευθύνει το σχηματισμό αλυσίδας (δλδ., το πρώτο ρομπότ του σχηματισμού αλυσίδας) θα πρέπει να ακολουθήσει μια ασφαλή πορεία στο χώρο εργασίας έτσι ώστε να επιτύχει το στόχο του, όπως αυτός διαμορφώνεται από την εκάστοτε εφαρμογή, π.χ., για ανίχνευση και επιτήρηση ενός πολύπλοκου χώρου εργασίας ή για αυτόνομη πλοήγηση αυτοκινήτων σε αυτοκινητόδρομους. Υποθέτουμε ότι το μοντέλο κίνησης των ρομπότ υπόκειται σε μη-ολονομικούς κινηματικούς περιορισμούς, δλδ., κάθε ρομποτικό όχημα μπορεί να κινείται κατά το διαμήκη άξονά του και να περιστρέφεται χωρίς όμως δυνατότητα πλαϊνής μετατόπισης, και περιορισμούς εισόδου (κορεσμός). Το σχήμα ελέγχου που θα σχεδιαστεί θα ακολουθεί την αποκεντρωμένη αρχιτεκτονική οδηγού-ακόλουθου και θα βασίζεται στον έμμεσο τύπο επικοινωνίας, που θα επιτυγχάνεται με οπτική παρατήρηση των γειτονικών ρομπότ, χρησιμοποιώντας κάμερα κατάλληλα τοποθετημένη σε κάθε ρομπότ. Παράλληλα, η ανίχνευση των εμποδίων για την αποφυγή συγκρούσεων θα επιτυγχάνεται με αισθητήρες εγγύτητας. Επιπλέον, υποθέτουμε ότι δεν είναι εφικτή η άμεση επικοινωνία μεταξύ ρομπότ με συνεχή ανταλλαγή μηνυμάτων, καθώς δεν υφίσταται εγκατεστημένο ευρυζωνικό δίκτυο επικοινωνίας.
Μεθοδολογία
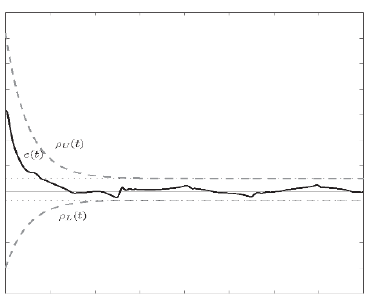
Για την αντιμετώπιση του παραπάνω προβλήματος, θα υιοθετήσουμε την τεχνική ελέγχου προδιαγεγραμμένης επίδοσης για να διασφαλίσουμε τους λειτουργικούς περιορισμούς που επιβάλλονται από το στενό εύρος θέασης των καμερών των ρομπότ. Σύμφωνα με την τεχνική του ελέγχου προδιαγεγραμμένης επίδοσης, υπό χαλαρές υποθέσεις εργασίας, μπορούμε να εξασφαλίσουμε σύγκλιση των σφαλμάτων παρακολούθησης με προαποφασισμένο ρυθμό και υπερύψωση σε οποιοδήποτε προεπιλεγμένο σύνολο. Οπότε, θα επιχειρήσουμε να εξασφαλίσουμε την οπτική διασυνδεσιμότητα του πολυρομποτικού συστήματος με ταυτόχρονη αποφυγή των εμποδίων του χώρου εργασίας, ικανοποιώντας κατάλληλα επιλεγμένα κριτήρια απόκρισης τόσο στη μεταβατική όσο και στη μόνιμη κατάσταση.
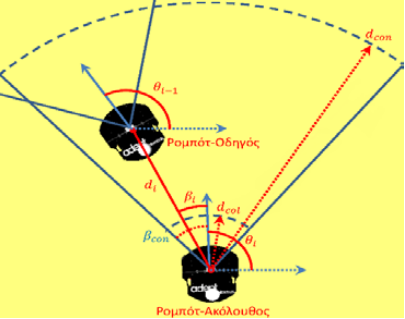
Η τεχνική προδιαγεγραμμένης επίδοσης έχει εφαρμοστεί επιτυχώς στο παρελθόν για τον συντονισμό της κίνησης πολυρομποτικού συστήματος σε σχηματισμό αλυσίδας με παρεμφερείς λειτουργικούς περιορισμούς, απουσία ωστόσο σταθερών εμποδίων στο χώρο εργασίας. Αξίζει να σημειωθεί στο σημείο αυτό ότι η ύπαρξη σταθερών εμποδίων στο χώρο εργασίας αυξάνει σημαντικά την πολυπλοκότητα της λύσης διότι η διαδικασία αποφυγής εμποδίων λειτουργεί ανταγωνιστικά προς τη διατήρηση των λειτουργικών περιορισμών. Για παράδειγμα, το ρομπότ-οδηγός μπορεί να βρεθεί εκτός του πεδίου θέασης της κάμερας του ρομπότ-ακολούθου του, στην προσπάθειά του ρομπότ-ακολούθου να αποφύγει τη σύγκρουση με ένα εμπόδιο που βρίσκεται στην πορεία. Ως εκ τούτου, ένα εμπόδιο δύναται να παρεμβληθεί μεταξύ διαδοχικών ρομπότ διακόπτοντας την οπτική επαφή τους και διακινδυνεύοντας έτσι την ασφαλή λειτουργία του πολυρομποτικού συστήματος. Για την αντιμετώπιση του προβλήματος της αποφυγής σταθερών εμποδίων με ταυτόχρονη διασφάλιση της οπτικής διασυνδεσιμότητας, θα προτείνουμε μια νέα στρατηγική ελέγχου, τροποποιώντας κατάλληλα την τεχνική ελέγχου προδιαγεγραμμένης επίδοσης. Πιο συγκεκριμένα, θα επιχειρήσουμε να σχεδιάσουμε μια προσαρμοστική τεχνική ελέγχου των προδιαγραφών απόκρισης, η οποία θα τροποποιεί τη γωνία θέασης και την απόσταση κάθε ρομπότ με το ρομπότ-οδηγό του σε πραγματικό χρόνο μέσω των συναρτήσεων επίδοσης, συμβιβάζοντας όλους τους λειτουργικούς περιορισμούς και την ασφάλεια του πολυρομποτικού συστήματος, εξασφαλίζοντας έτσι την απρόσκοπτη λειτουργία του.
Συνεισφορά & Καινοτομία
Από τα παραπάνω, γίνεται αντιληπτό πως το πρόβλημα το οποίο καλείται να επιλύσει η παρούσα ερευνητική πρόταση συνδέεται άμεσα με πληθώρα πρακτικών εφαρμογών στις οποίες δεν είναι δυνατή η ύπαρξη κεντρικού συστήματος ελέγχου ή εντοπισμού.
Παράδειγμα τέτοιας εφαρμογής είναι η συνοδεία οχημάτων / αυτοκινητοπομπή (convoy) που κάνουν χρήση του οδικού δικτύου για την μετακίνησή τους. Την τελευταία δεκαετία, σημαντικό ποσοστό της έρευνας έχει αναλωθεί στον σχεδιασμό αυτόνομων οχημάτων, τα οποία έχουν ήδη κάνει την εμφάνισή τους στους δρόμους, αν και σε σχετικά πρώιμο στάδιο. Ο έλεγχος συμβατικών οχημάτων, όπως αυτοκινήτων και μοτοσυκλετών, είναι ένα σύνθετο πρόβλημα καθώς το μοντέλο κίνησής τους υπόκειται σε παρόμοιους μη- ολονομικούς περιορισμούς με αυτούς που εξετάζονται σε αυτή την εργασία. Επίσης, καθώς οι αισθητήρες απόλυτης θέσης, όπως το GPS, έχουν μεγάλα σφάλματα και καθυστερήσεις (σφάλμα ±6 μέτρα), για την επίτευξη συντονισμένης κίνησης σε τέτοιου είδους σενάρια είναι απαραίτητη η χρήση αισθητηρίων σχετικής θέσης (π.χ., κάμερες, lasers), τα οποία εισάγουν περιορισμούς (π.χ., διατήρηση οπτικής επαφής) που πρέπει να λαμβάνονται υπόψη από το σχήμα ελέγχου.
Ένα άλλο παράδειγμα εφαρμογής, στα πλαίσια της αλληλεπίδρασης ανθρώπου-
ρομπότ, είναι η συνεργασία ανθρώπων-οδηγών με ρομπότ-ακολούθους, οι οποίοι κινούνται εντός σύνθετων ή μη-δομημένων χώρων εργασίας. Τα ρομποτικά οχήματα με μη-ολονομικούς περιορισμούς κίνησης, λόγω της απλής δομής και του χαμηλού κόστους τους, αποτελούν δημοφιλείς πλατφόρμες για βιομηχανικές εφαρμογές, με το ποσοστό χρήσης τους να αυξάνεται συνεχώς τα τελευταία χρόνια. Ως εκ τούτου, έχουν αρχίσει να εξετάζονται σενάρια κατά τα οποία οι εργαζόμενοι/χειριστές μπορούν να υποδείξουν τον προορισμό ή να οδηγήσουν με άμεσο τρόπο ομάδες ρομπότ στις διάφορες περιοχές του χώρου όπου απαιτείται να επιτελέσουν κάποια εργασία (π.χ., συνεργατική μεταφορά βαρέων αντικειμένων).
Η καινοτομία της εν λόγω ερευνητικού έργου έγκειται στο γεγονός ότι προτείνει μία νέα αποκεντρωμένη μεθοδολογία σχεδιασμού κίνησης ενός πολυρομποτικού συστήματος που υπόκειται σε πληθώρα λειτουργικών περιορισμών, βασισμένη στην πρόσφατη τεχνική ελέγχου προδιαγεγραμμένης επίδοσης, που έχει προταθεί από μέλος της παρούσας ερευνητικής ομάδας. Επίσης, σε αντίθεση με την πλειοψηφία των σχετικών εργασιών στην βιβλιογραφία, η προτεινόμενη μεθοδολογία θα είναι σε θέση να αντιμετωπίσει, εκτός των άλλων, και το πρόβλημα της παρεμβολής εμποδίων μεταξύ οδηγού και ακόλουθου (visual obstruction). Παράλληλα, η ύπαρξη μη-ολονομικών κινηματικών περιορισμών δυσχεραίνει την ταυτόχρονη ικανοποίηση όλων των προδιαγραφών, καθότι περιορίζει τις δυνατότητες κίνησης των ρομπότ με αποτέλεσμα την εμφάνιση αντικρουόμενων στόχων ελέγχου. Ωστόσο, η προτεινόμενη προσέγγιση θα εξασφαλίζει την ικανοποίηση των προδιαγραφών με μόνη προϋπόθεση την τήρηση κάποιων χαλαρών γεωμετρικών περιορισμών που εγγυώνται τη γενική ύπαρξη λύσης. Επιπλέον, η προτεινόμενη μεθοδολογία δεν προϋποθέτει κάποιον περιορισμό στο προφίλ κίνησης του ρομπότ-οδηγού. Η ιδιότητα αυτή κρίνεται ιδιαιτέρως σημαντική καθότι επιτρέπει τη χρήση της προτεινόμενης μεθοδολογίας σαν υποσύστημα μίας γενικότερης αρχιτεκτονικής σχεδιασμού κίνησης χωρίς να θέτει λειτουργικές απαιτήσεις από τις υπόλοιπες δομικές μονάδες.